UWB Ranging and Positioning Principle for Indoor Positioning

We all know that satellite signals will be seriously affected indoors, resulting in GPS or Beidou unable to send positioning. Therefore, a set of indoor position positioning system is needed to realize the position monitoring of people and objects in indoor space. Common indoor wireless positioning technologies are Wi-Fi, Bluetooth, infrared, ultra-wideband, RFID, ZigBee, and ultrasonic.Today SKYLAB will talk about the principle of UWB-Ultra Wideband indoor ranging and positioning.
What is UWB?
UWB technology does not require the use of carriers in traditional communication systems. Instead, data is transmitted by sending and receiving extremely narrow pulses with nanoseconds or less. Thus, it has a bandwidth of the order of GHz.
What is the difference between UWB and narrowband systems?
The UWB system has the advantages of strong penetration, low power consumption, good anti-multipath effect, high security, low complexity, and precise positioning. Therefore, UWB technology can be applied to indoor positioning tracking and navigation, and can provide precise positioning accuracy.
What is the ranging principle of UWB?
TWR is two-way ranging, and the ranging module sends ultra-wideband pulse signals back and forth. The flight time can be obtained by subtracting the delay of the module itself from the received time difference. Each module of TWR will generate an independent timestamp from the start. The transmitter of module A transmits a pulse signal of the requested nature at Tsp at its time stamp. Module B transmits a responsive signal at TSR time. Module A receives at its own time stamp TRR, and then sends a signal to be received at TRF by module B. These two data can calculate the flight time T of the pulse signal between the two modules, so as to determine the flight distance S.
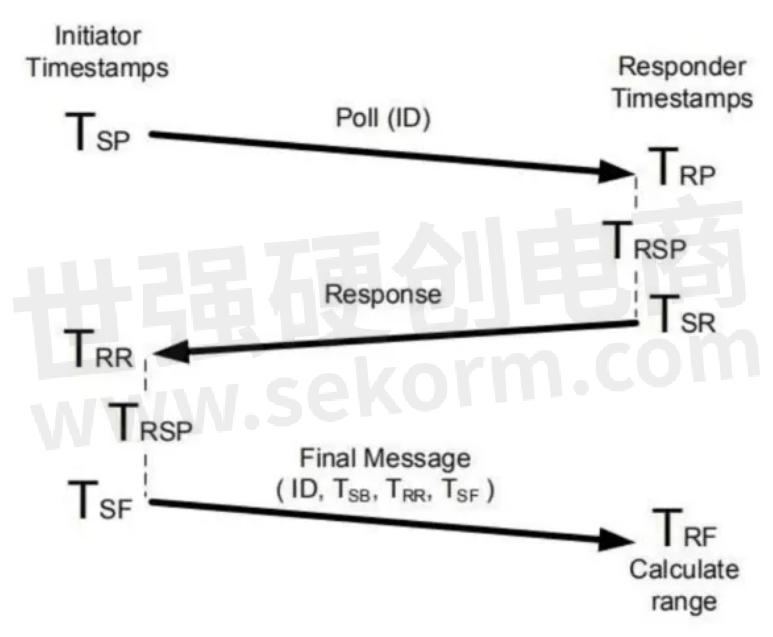
TOF =( (TRR - TSP) - (TSR - TRP) + (TRF - TSR) - (TSF - TRR) ) / 4 TOF = ( 2TRR - TSP - 2TSR + TRP + TRF - TSF ) / 4 d=TOF*c
TOF ranging method belongs to two-way ranging technology. It mainly uses the time of flight of the signal between two asynchronous transceivers to measure the distance between nodes. In the line-of-sight environment, the TOF-based ranging method has a linear relationship with the distance, so the result will be more accurate. We denote the time between the sender sending the packet and receiving the response as TTOT. The time interval between the receiver receiving the data packet and sending the response is recorded as TTAT. Then the time TTOF of the one-way flight of the data packet in the air can be calculated as: TTOF=(TTOT-TTAT)/2
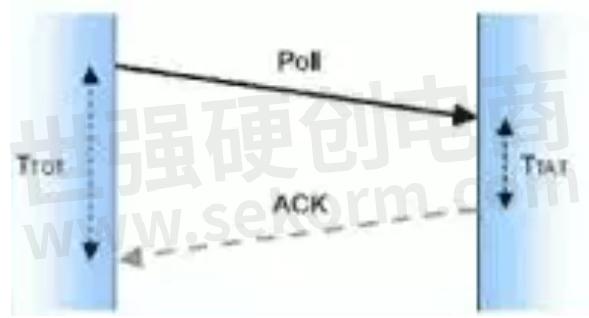
According to the results of TTOF and electromagnetic wave propagation speed, the distance between two points can be calculated D=CxTTOF
TOF ranging method and two key side constraints
(1)The sending and receiving devices must always be in sync
(2)The length of the transmission time of the signal provided by the receiving device
In order to achieve always synchronization, the TOF ranging method adopts always offset to solve the always synchronization problem. Due to the time from the TOF ranging method to the local remote points, the side ranging accuracy is easily affected by the constant offset in the nodes at both ends. To reduce the impact of such errors, this uses a reverse measurement method. That is, the remote node sends the data packet, the local node receives the data packet, and automatically responds. Ranging errors are reduced by averaging the average of multiple forward and reverse measurements, reducing the effect of any always offset.
What is the positioning principle of UWB?
The indoor positioning function of UWB is very similar to the principle of satellite. Four positioning base stations with known coordinates are arranged indoors. Personnel or equipment carry location tags. The tag transmits pulses at a certain frequency and continuously measures the distance with 4 base stations. Determine the position of the label through a certain precise algorithm。
- +1 Like
- Add to Favorites
Recommend
- What are the Functions of the Smart Construction Site Personnel Positioning System?
- How To Choose The Smart Home IoT WiFi Module?
- SKYLAB and MMC developed Long-endurance UAV Power Line Patrol Automatic Solution
- SKYLAB provides UAV Petrochemical Pipeline Inspection Solution
- SKYLAB‘s Parking Lot Bluetooth Positioning and Navigation Solution
- SKYLAB launched a GPS positioning system solution for Logistics truck GPS Positioning Tracking Application
- SKYLAB GPS positioning technology help people solve the problem of lost pets and find their pets faster,more conveniently
- SKYLAB Has Launched a Bluetooth Indoor Positioning and Navigation System Solution
This document is provided by Sekorm Platform for VIP exclusive service. The copyright is owned by Sekorm. Without authorization, any medias, websites or individual are not allowed to reprint. When authorizing the reprint, the link of www.sekorm.com must be indicated.
Integrated Circuits












































































































































































































































































































































Discrete Components



























































































































































































Connectors & Structural Components





























































Assembly UnitModules & Accessories
















































































































Power Supplies & Power Modules






Electronic Materials







































































Instrumentation & Test Kit










































Electrical Tools & Materials





Mechatronics










Processing & Customization






















































