Line Laser Obstacle Technology Avoidance Used in Sweepers
With the development of science and technology, sweepers have gradually entered thousands of households. In the past, sweepers were nicknamed "artificial intellectual disability" due to poor obstacle avoidance ability, hitting walls everywhere during work, and after several years of development, sweepers have been able to solve the problem of obstacle avoidance well, which is worthy of the title of "artificial intelligence". In fact, this progress is precisely the progress of core obstacle avoidance function module technology.
What are the common obstacle avoidance schemes?

(1) Infrared tube obstacle avoidance (short-range sensing and no ranging function)
(2) Single and binocular obstacle avoidance (high definition, but depth information cannot be directly obtained)
(3) Structured light obstacle avoidance (long distance, can be measured, under certain circumstances, it is interfered with by ambient light)
(4) Infrared PSD sensing obstacle avoidance (short distance, can be measured, but the accuracy is not high)
(5) 3D TOF (more used for sweeper top LIDAR bias navigation and two-dimensional plane modeling, auxiliary obstacle avoidance)
In addition to infrared tube obstacle avoidance and infrared PSD sensing obstacle avoidance, let's talk about the other 4 mainstream obstacle avoidance technologies on the market at present.
Visible-based monocular cameras and binocular cameras
3D TOF based on invisible-infrared light and 3D structured light-two-line laser
Single/binocular camera obstacle avoidance technology - visual obstacle avoidance
In monocular obstacle avoidance, the shape of the obstacle is recorded by a single camera, and the algorithm recognizes the size and distance of the current object, but it is impossible to judge the object that does not exist in the database. In addition to the unique advantages of visual recognition, the binocular obstacle avoidance system uses the method of parallel shooting to identify the difference in the images recorded by the two cameras through the information recorded by the dual cameras, which can provide more data for identifying the type of obstacle. In general, from the perspective of practicality, sweeping robots using binocular recognition technology can better adapt to the working environment, and at the same time, in terms of obstacle avoidance performance, they can also identify more kinds of obstacles, and then choose the response through databases and algorithms.

3D TOF obstacle avoidance technology - more biased towards LIDAR navigation and 2D plane modeling
TOF technology can roughly understand its principle from its name - time of flight, flight time, mainly by emitting light, light encounters impenetrable objects will be reflected, by recording the time when the reflected light reaches the receiver, because the speed of light and light wavelength is known, to calculate the distance between the light source and the object. This technology uses a more single-point TOF scheme, which is used for LIDAR on the top of the sweeper to obtain environmental depth information by turning to scan to assist obstacle avoidance, but it is more biased towards the final effect of navigation and two-dimensional plane modeling.
3D structured light obstacle avoidance technology - more linear lasers are used in sweepers
In the 3D structured light scheme, the principle is to use an infrared light source, the emitted light through a certain code projection on the object, these patterns through the surface of the object reflected back, with the distance of the object will occur different deformation, the image sensor will take the deformed pattern. Then, by calculating the amount of distortion of each pixel in the captured pattern, the corresponding parallax is obtained, and then the depth value is obtained. However, the ranging range of the structured light scheme is affected by the spot pattern, and the obstacle avoidance range is small. In addition, the performance in a strong light environment is poor, and it is easily affected by light.
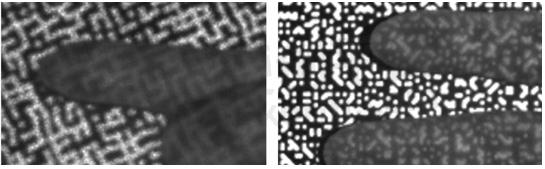
3D structured light
Two-line laser
Two crossed-line lasers work together to create a stereoscopic map by moving the sweeper. The advantage of dual-line laser obstacle avoidance is that the ability to resist ambient light interference is relatively strong; In the face of a dark light environment, when the light becomes dark, the objects in the camera are basically invisible, and under the role of infrared light, the sweeper can still clearly see the road ahead, in fact, it can be understood that the sweeping robot has been holding a flashlight to illuminate the front, and the light out of this flashlight, our human eyes cannot see. For strong light environments, the infrared light in the ambient light is relatively strong, and the infrared light in the machine is required to be strong enough to weaken the interference in the ambient light.
The line laser used in the sweeper is not continuously output but works at a certain frequency. In the same unit of time, as long as the line laser module works more frequently, the sweeper can get more information, thereby helping the sweeper judge obstacles faster, so whether it is facing sudden people, pets, or other debris, the sweeper can judge obstacles and avoid them.
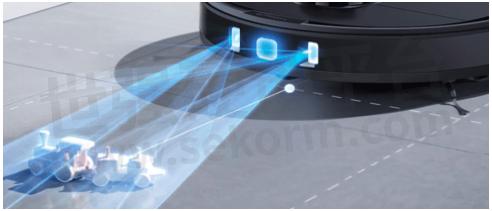
Two-line laser
- +1 Like
- Add to Favorites
Recommend
- Crocus Technology’s CT100 1D Linear Sensor Contactless TMR Field Sensor with Differential Outputs
- E&R Conducts Advanced Wafer Scribing with Coherent’s Monaco Femtosecond Lasers Achieving Repetition Rate up to 50MHz
- Explore How Gain and Nonlinear Crystals Drive Laser-based Medical Treatments and Diagnostics
- Unimotion Linear Units and Their Integration into Multi-axis Systems Enable the Conversion of Rotation into Linear Displacement
- The Working Principle Of Linear Hall Sensor
- Coherent Introduces Next-Generation Ultralow-Cost Matrix UV Lasers for Marking Applications in Consumer Goods, Industrial Electronics, and Packaging
- S4-3DB01 3D Linear Hall-Effect Sensor IC with SFI Capabilities & Wake-Up Function in a Small TSSOP8L Package
- What Is A Linear Regulator?
This document is provided by Sekorm Platform for VIP exclusive service. The copyright is owned by Sekorm. Without authorization, any medias, websites or individual are not allowed to reprint. When authorizing the reprint, the link of www.sekorm.com must be indicated.
Integrated Circuits













































































































































































































































































































































Discrete Components



























































































































































































Connectors & Structural Components





























































Assembly UnitModules & Accessories
















































































































Power Supplies & Power Modules






Electronic Materials







































































Instrumentation & Test Kit










































Electrical Tools & Materials





Mechatronics










Processing & Customization






















































