Port Personnel Container Asset UWB Location Tracking Solution from SKYLAB

The world's ports are large in scale, with a large number of containers and materials. There are difficulties in effectively managing a large number of materials and personnel.

At present, more applications in ports are GPS positioning systems. However, GPS satellite signals are easily blocked and refracted by the building, which leads to inaccurate positioning. UWB technology can effectively solve the problem of GNSS signal positioning in the case of obscuration.
SKYLAB has developed a high-precision UWB positioning management system. The system supports TWR/TDOA positioning algorithm. In the actual test of the harbor in an open area, the two-way ranging distance can reach 10km, and the positioning accuracy is less than 30cm. SKYLAB UWB positioning system can precisely locate forklifts, containers, cargo, and personnel.
SKYLAB positioning management system uses UWB technology. Managers install UWB positioning base stations in the port area. Personnel wears UWB positioning tags, and the system can achieve accurate positioning of personnel. Container cargoes are also installed with UWB positioning tags, and the system can realize the accurate positioning of equipment assets. This can help managers to strengthen the management of personnel and equipment. It can reduce the safety hazards caused by the unauthorized operation of employees.
UWB Positioning System Architecture
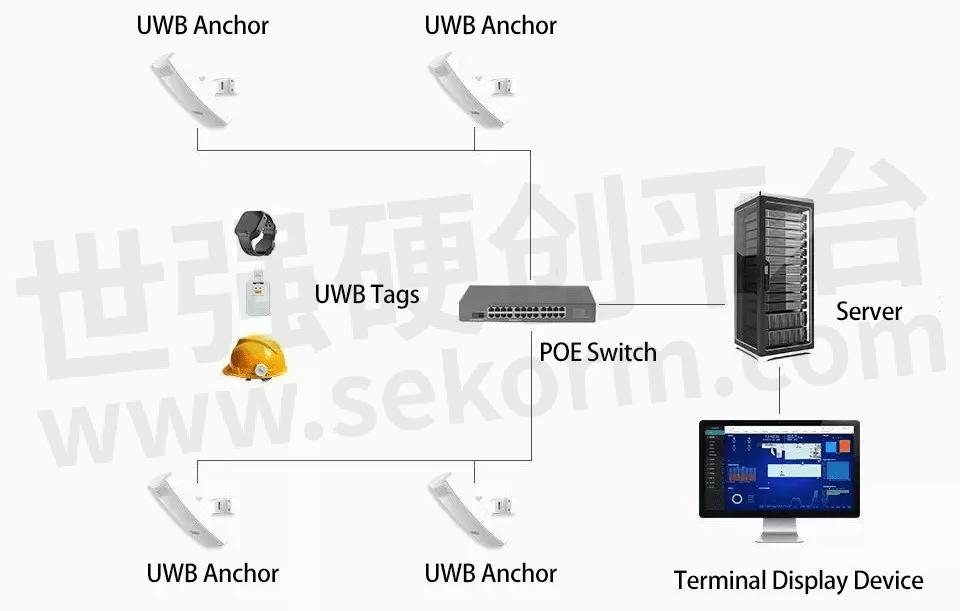
The architecture of the SKYLAB UWB High Accuracy Indoor Positioning System consists of UWB Anchor, UWB tags, a positioning engine, and a terminal display device.
(1) UWB Anchor: Install the UWB positioning base station in the seaport. The UWB base station communicates with the positioning tag to realize the function of positioning the UWB tag.
(2) UWB Tag: Staff wears UWB positioning tags, and items are bound with UWB positioning tags. The tags transmit UWB signals to communicate with the base station. Through the calculation of the positioning engine, the label itself is located.
(3) Location Engine: The UWB base station sends raw data to the positioning engine in real-time. The positioning engine calculates the coordinate position of the positioning label in real-time.
(4) Display Terminal: The positioning coordinates calculated by the UWB positioning engine are displayed on the terminal. The terminal may be a PC, a tablet, a mobile phone, and other devices.
Main functions of port UWB high-precision positioning system
(1) Real-time positioning
UWB positioning system can accurately display the location of port personnel, container materials, and vehicles. Managers can track and master the site dynamics in real-time, thus reducing personnel violations and ensuring material safety.
(2)Historical track
UWB positioning system can query the historical activity trajectory of personnel and running vehicles within a period of time. It provides a data basis for personnel management. If an accident occurs, the historical track situation of the site can be.
(3) Work time statistics
UWB positioning system real-time statistics of port personnel working hours. It can count the personal attendance information in daily and monthly time periods.
(4)Electronic fence
UWB positioning system can set electronic fences. It can realize the security management of key areas. Managers can also set permissions and violation alarms to ensure safe production in the area.
(5)One key call for help
Once personnel encounter danger or need assistance, they can use the UWB positioning tags they wear to make a one-touch call for help. The rescuer can carry out the rescue according to the location of the help. It improves the efficiency of rescue and security rescue.
TWR passive positioning system product introduction
(1)UWB TWR ranging base station VDU2506
VDU2506 is a UWB positioning base station that supports TWR two-way ranging. It has a coverage radius of 400m+ and supports 1000m two-way ranging. VDU2506 supports all channels ch1-5, uses a POE power supply, and has an IP67 rating. It supports TWR/TDOA positioning algorithm, and the positioning accuracy is less than 30cm.

(2)UWB TWR ranging module SKU620
SKU620 is a long-distance UWB ranging module. It has a positioning accuracy of 10cm-30cm and supports long-distance ranging of 500 meters. SKU620 is developed based on the DW1000 solution and supports IEEE802.15.4-2011 UWB protocol. It integrates the nRF52832 main control chip and provides multiple interfaces, which is convenient for customers to carry out secondary development.

(3)UWB TWR ranging tag VDU1506R
The uwb tag VDU1506R supports 1000m TWR two-way distance measurement and positioning. It is developed based on the DW1000 solution, with an integrated SOS button, IP66 waterproof and dustproof. VDU1506R supports two installation methods, which can be installed on the safety helmet.

(4)UWB TWR ranging tag VDU1501R
VDU1501R is a uwb positioning tag work card. It integrates DW1000 and nRF52832 and supports TDOA/TWR positioning algorithm. The positioning accuracy of VDU1501R is 10-30cm. It is equipped with an SOS button, IP67 waterproof, and a lanyard. VDU1501R supports UWB positioning and ranging applications.

- +1 Like
- Add to Favorites
Recommend
- SKYLAB has developed and produced the TWR UWB positioning system kit including two parts: UWBpositioning base station and UWB label
- SKYLAB Provides a Tunnel Construction Personnel UWB Positioning Project Case
- What are the Functions of the Smart Construction Site Personnel Positioning System?
- SKYLAB launched a mine tunnel personnel UWB positioning solution
- Introduction of SKYLAB UWB TWR Passive Positioning System
- Introduction of SKYLAB Anti-collision Warning Solution for Personnel and Forklifts
- How To Choose The Smart Home IoT WiFi Module?
- SKYLAB and MMC developed Long-endurance UAV Power Line Patrol Automatic Solution
This document is provided by Sekorm Platform for VIP exclusive service. The copyright is owned by Sekorm. Without authorization, any medias, websites or individual are not allowed to reprint. When authorizing the reprint, the link of www.sekorm.com must be indicated.
Integrated Circuits













































































































































































































































































































































Discrete Components



























































































































































































Connectors & Structural Components





























































Assembly UnitModules & Accessories
















































































































Power Supplies & Power Modules






Electronic Materials







































































Instrumentation & Test Kit










































Electrical Tools & Materials





Mechatronics










Processing & Customization






















































