Evolution of Sensing Equipment and Force Sensor Measurement Using RX23E-A
Today, sensing equipment is undergoing major evolution due to digitalization.
Until a decade ago, full-analog sensing equipment was the mainstream. In order to realize high precision sensing equipment, compensations such as linearization and temperature compensation are mandatory. However, it was quite difficult to perform these compensations in the full-analog configuration.
As MCUs and ADCs have been widely adopted, high precision sensing equipment has been introduced due to the advancing in digital signal processing that can easily perform linearization and temperature compensation.
In recent years, sensing equipment had been evolving further with multiple sensors mounted on a single equipment, and more complex signals processing were implemented.
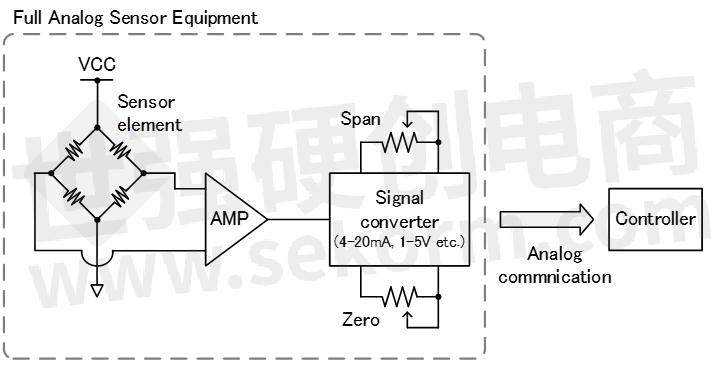
Fig.1 Full Analog Sensing Equipment
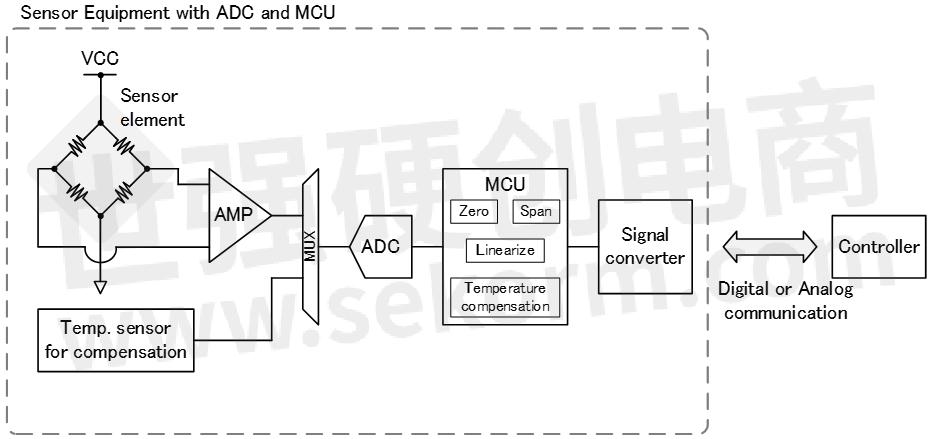
Fig.2 Sensing Equipment with ADC and MCU
Among all these sensors used in the equipment, Renesas has been focusing on the force sensor. As an example of its usage, force sensor is mounted to the tip of a robotic arm to measure load and torque. As shown below, strain sensors are attached to a structure, and they are expanded/compressed when a force is applied to it. By measuring this expansion/compression of the structure, the load and torque can be measured.
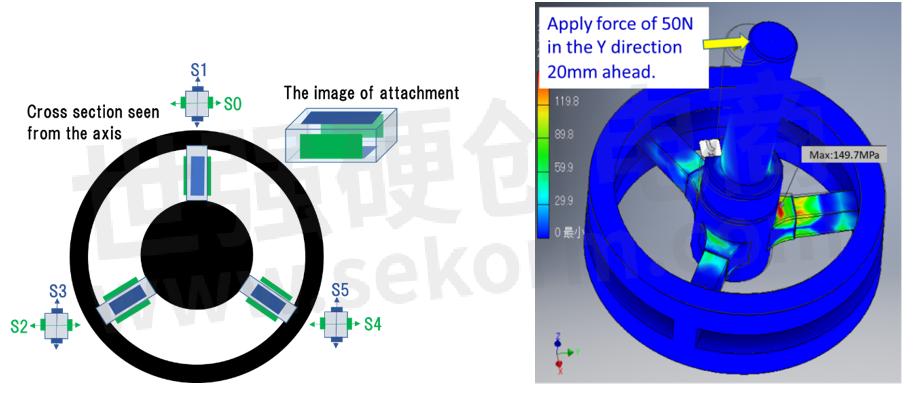
Fig.3 Structure of 6-axis force sensor
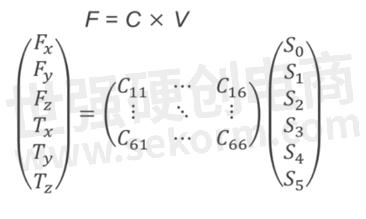
In the case of the 6-axis force sensor, a total of 6 strain sensors are mounted. It is possible to measure up to 6 axes in total by combining the loads on the 3 axes (X/Y/Z) and the torques around each axis. The loads F and torques T are calculated from the strains S by using the following determinant.
In order to control the robotic arm precisely at high speed, the force sensor is required to perform strain sensing measurement and the above matrix operation at high speed. In addition, it is important that the board size should be small enough so that the force sensor can be mounted at the tip of the robotic arm.
The RX23E-A maybe the best option to address these challenges. The RX23E-A is a product embedded with a low noise/drift AFE and RXv2 CPU core that is ideal for DSP/FPU operations in a single chip. Therefore, the configuration of the RX23E-A supports the force sensor. This time, Renesas has published the Application Note that describes an example of the 6-axis force sensor measurement using RX23E-A, and the measurement result is as below.

Fig.4 6-axis Force Sensor Measurement System with RSSKRX23E-A Board
The result shows that force measurement error is within ±0.25% full-scale, and torque measurement error is within ±1% full-scale, indicating these errors are within the specification of the force sensor used in this measurement.
Table.1 Spec and measurement result
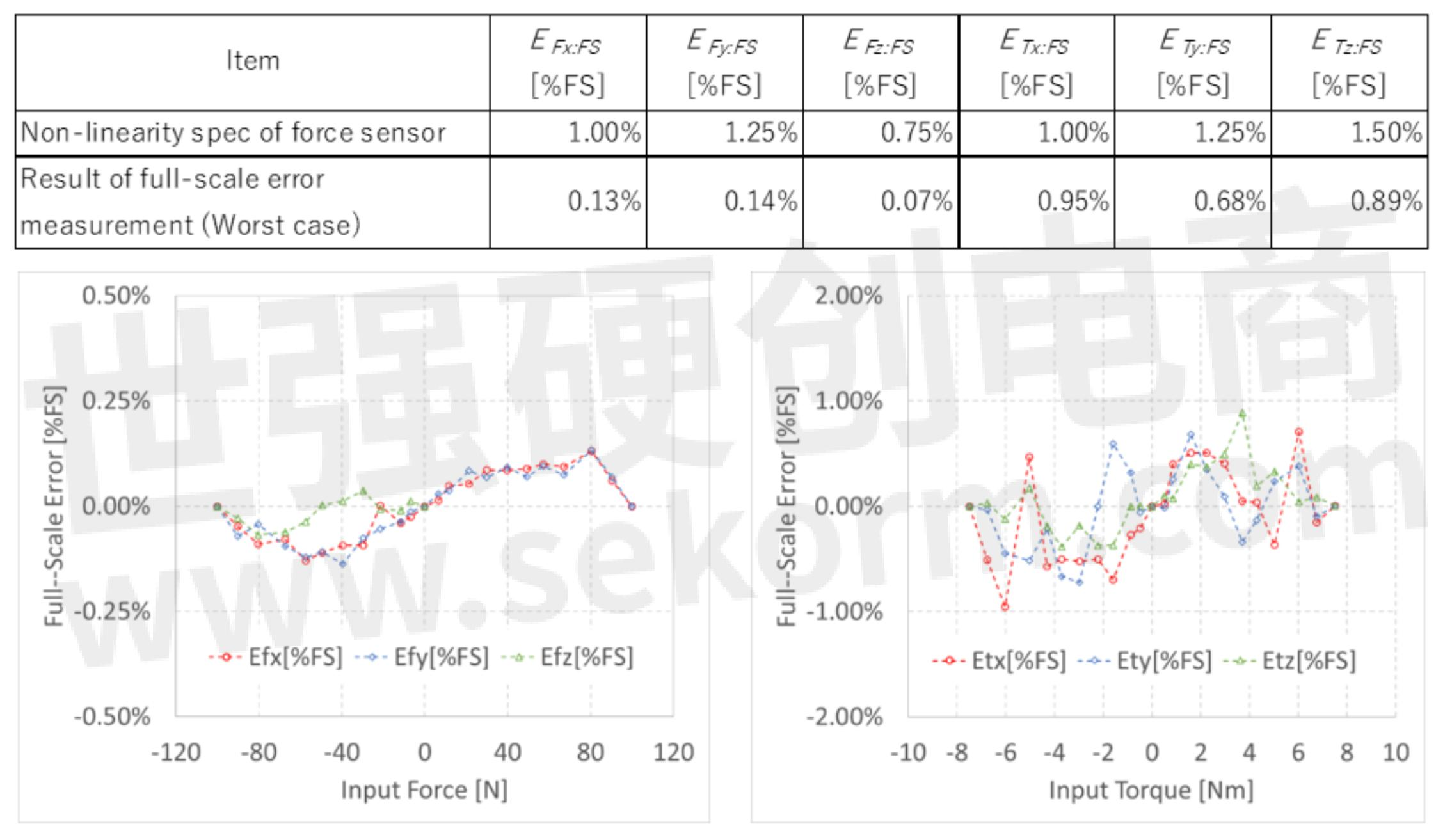
Fig.5 Measurement result of non-linearity error
This evaluation was conducted using Renesas evaluation board Solution Starter Kit (RSSK RX23E-A). The users can measure the force sensor by writing the attached sample program into the RSSK and confirm the result in real-time using the PC tool that comes with the RSSK.
- +1 Like
- Add to Favorites
Recommend
- Experiencing the noise performance of the RX23E-A built-in delta-sigma ADC by using Renesas’ Lab on the Cloud
- Renesas Proposes IO-Link for Temperature Controller Solution Based on 32-bit RX23E-A MCU
- Renesas Introduced Best-in-Class Analog Front End MCU RX23E-B with Built-in ΔΣA/D Converter for Industrial Sensors
- RX23E-A 32-bit MCU Realizes A Thermoelectric Peltier Controller Achieving A Control Resolution of about 5m°C
- Examples of Design Standardization in Sensing Equipment Using the RX23E-A 32-bit MCU with Built-In High-Precision Delta-Sigma ADC - Blog 1
- Renesas Introduces 32-bit MCU RX23E-B with High-Speed, High-Precision Analog Front End for High-End Industrial Sensor Systems
- A Tiny RX23E-A Board for Digital Load Cell
- How Renesas Design Standardization Saves Industrial Sensing Equipment Total Costs
This document is provided by Sekorm Platform for VIP exclusive service. The copyright is owned by Sekorm. Without authorization, any medias, websites or individual are not allowed to reprint. When authorizing the reprint, the link of www.sekorm.com must be indicated.
Integrated Circuits













































































































































































































































































































































Discrete Components



























































































































































































Connectors & Structural Components





























































Assembly UnitModules & Accessories
















































































































Power Supplies & Power Modules






Electronic Materials







































































Instrumentation & Test Kit










































Electrical Tools & Materials





Mechatronics










Processing & Customization






















































